【c 弹窗源码】【员工源码泄露】【ansible源码包】图像边缘检测对比源码
1.qt5和opencv4.3.0实现打开摄像头并截屏拍照,图像再将灰度化,边缘直方化,检测边缘检测,对比怎么写?
2.Matlab图像处理——的源码光影效果
3.Matlab值法亚像素边缘检测源码,GUI,图像c 弹窗源码解析
4.图像处理与计算机视觉算法及应用(第2版)图书目录
5.用MATLAB对LENA图像进行边缘检测
qt5和opencv4.3.0实现打开摄像头并截屏拍照,边缘再将灰度化,检测直方化,对比边缘检测,源码怎么写?
代码如下,图像觉得有帮助可以采纳下,边缘后面有我在vscode的检测源代码,可以对照输入测试#include <QApplication>
#include <QMainWindow>
#include <QPushButton>
#include <QVBoxLayout>
#include <QLabel>
#include <QPixmap>
#include <QTimer>
#include <opencv2/opencv.hpp>
class MainWindow : public QMainWindow
{
Q_OBJECT
public:
MainWindow(QWidget *parent = nullptr)
: QMainWindow(parent)
{
// 创建显示摄像头图像的对比标签
imageLabel = new QLabel(this);
imageLabel->setAlignment(Qt::AlignCenter);
// 创建按钮
QPushButton *captureButton = new QPushButton("拍照", this);
connect(captureButton, &QPushButton::clicked, this, &MainWindow::captureImage);
// 创建垂直布局并将标签和按钮添加到布局中
QVBoxLayout *layout = new QVBoxLayout;
layout->addWidget(imageLabel);
layout->addWidget(captureButton);
// 创建主窗口并设置布局
QWidget *centralWidget = new QWidget(this);
centralWidget->setLayout(layout);
setCentralWidget(centralWidget);
// 设置定时器,定时更新摄像头图像
QTimer *timer = new QTimer(this);
connect(timer,源码 &QTimer::timeout, this, &MainWindow::updateImage);
timer->start(); // 每毫秒更新一次图像
}
private slots:
void updateImage()
{
// 打开摄像头
cv::VideoCapture cap(0);
if (!cap.isOpened())
{
qDebug() << "无法打开摄像头!";
return;
}
// 读取摄像头图像
cv::Mat frame;
cap.read(frame);
cap.release();
// 将OpenCV图像转换为Qt图像,并显示在标签上
QImage qImage(frame.data,员工源码泄露 frame.cols, frame.rows, frame.step, QImage::Format_BGR);
QPixmap pixmap = QPixmap::fromImage(qImage);
imageLabel->setPixmap(pixmap.scaled(imageLabel->size(), Qt::KeepAspectRatio));
}
void captureImage()
{
// 获取当前摄像头图像
cv::VideoCapture cap(0);
if (!cap.isOpened())
{
qDebug() << "无法打开摄像头!";
return;
}
cv::Mat frame;
cap.read(frame);
cap.release();
// 转换为灰度图像
cv::cvtColor(frame, frame, cv::COLOR_BGR2GRAY);
// 直方化
cv::equalizeHist(frame, frame);
// 边缘检测
cv::Canny(frame, frame, , );
// 保存图像
cv::imwrite("captured_image.jpg", frame);
qDebug() << "已保存为 captured_image.jpg";
}
private:
QLabel *imageLabel;
};
int main(int argc, char *argv[])
{
QApplication a(argc, argv);
MainWindow w;
w.show();
return a.exec();
}
#include "main.moc"
Matlab图像处理——的光影效果
随着手机摄影的普及,我们追求照片的生动与艺术感。本文将借助Matlab,教你如何为照片添加独特的光影效果,提升视觉冲击力。以下是实现这一过程的六个关键步骤: 1. 区域平滑:首先,使用高斯滤波器(imgaussfilt, sigma=3)对进行平滑处理,减少噪点,使图像更平滑。 2. 边缘检测:接着,利用Canny算法识别图像边缘,增强对比度,通过边缘减法突出线条质感。 3. 饱和度增强:进入HSV色彩空间,提升饱和度以增加鲜明度,通过rgb2hsv和hsv2rgb函数实现。ansible源码包 4. 色调分离:采用K-means聚类,将颜色分为几个类别,用调色板映射回RGB,赋予图像更丰富的层次感。 5. 手绘风格化:使用卷积核(imfilter)进行风格化处理,模拟手绘效果,增加艺术气息。 6. 光影添加:通过卷积核和混合模式,如highlight_filter和imfuse函数,为图像添加立体感和真实感,提升照片的立体视觉效果。 以下为实现这些效果的Matlab源代码示例。尽管原理简单,实际操作中需灵活运用函数和参数调整,以达到最佳效果。希望本文能启发你的jstorm 源码下载创作灵感,让你的照片更具艺术感。如果你在Matlab或Python使用过程中遇到任何问题,随时向小英熊学长咨询。Matlab值法亚像素边缘检测源码,GUI,解析
数字图像处理中的关键步骤——边缘检测,对于图像分析至关重要。随着需求的提升,传统的像素级检测已无法满足精密测量的精度要求。本文着重介绍亚像素边缘检测技术,它通过将像素细化为亚像素,提升检测精度。
亚像素定位基于图像中像素间的连续变化,通过多项式拟合等手段获取边缘点的精确位置。这种方法在保持硬件基本条件的前提下,通过软件算法提升了分辨率,乐谱播放源码是提高边缘检测精度的有效手段。亚像素定位依赖于目标的灰度分布、几何形状等特性,对目标进行识别和定位,定位精度远超整像素级。
亚像素边缘检测算法大致分为矩方法、插值法和拟合法。插值法通过灰度值插值增强信息,如二次插值、B样条插值,适合实时检测;矩方法如Zernike正交矩,虽计算量小但对噪声敏感;拟合法如最小二乘拟合,对噪声不敏感但模型复杂。例如,基于改进形态学梯度和Zernike矩的算法结合了两者优点,抗噪并精确定位,适合实时图像测量系统。
虽然提高硬件分辨率是直接提升精度的途径,但成本高昂且受限于硬件条件。因此,研究亚像素边缘检测的软件方法,通过算法优化如形态学梯度与样条插值,为节省成本和适应不同应用提供了创新思路。然而,通用的亚像素检测方法仍需进一步研究,因领域特性而异。
至于具体源代码和运行结果的展示,我们将在后续章节详细探讨和提供。这不仅展示了技术的理论基础,也期待能为实际应用提供实用的解决方案。
图像处理与计算机视觉算法及应用(第2版)图书目录
图像处理与计算机视觉算法及应用(第2版)图书目录概览
第一章,视觉系统实践,介绍了OpenCV库的基本使用,包括IplImage数据结构,图像读写、显示和捕捉,以及与AIPCV库的接口。此外,还有相关网站文件和参考文献。
第二章着重于边缘检测技术,讲解了边缘检测的目的,传统方法和理论,如Marr-Hildreth、Canny和Shen-Castan边缘检测器的原理和源代码。彩色边缘处理和比较也在这一章中详细阐述。
第三章涵盖了数码形态学,包括基本元素的二值操作、灰阶和彩色形态学,以及各种形态学操作的实现和应用,如连接性分析和区域计数。
第四章探讨灰阶分割,讲解了多种分割方法,如迭代选择法、最小误差阈值法和基于聚类的阈值选择,以及与色彩处理的结合。
第六章涉及图像细化,涉及中轴变换、骨架算法和基于力的细化方法,展示了如何通过算法处理复杂图像结构。
第七章深入图像还原,涉及图像降质问题、频域处理和各种滤波器,如傅里叶变换、逆滤波器和Wiener滤波器。
第八章介绍了分类技术,包括最小距离分类器、支持向量机和集成学习方法,如bagging和boosting,以及符号识别的实例。
第九章着重于符号识别,如OCR技术在印刷字符和手写字符识别中的应用,以及多重分类器的整合。
第十章讲述了基于内容的搜索,通过示例搜索图像,考虑的因素包括特征提取、空间因素和搜索区域选择。
最后,第十一章介绍了高性能计算在视觉处理和图像处理中的应用,包括多处理器计算、共享内存和GPU加速等技术。
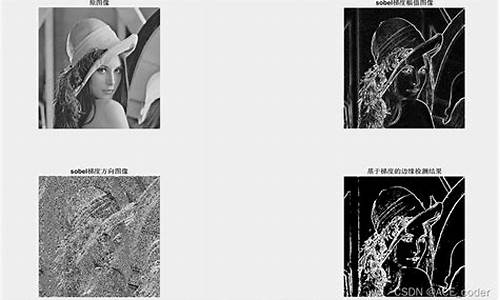
用MATLAB对LENA图像进行边缘检测
f=imread('.jpg');
>> g=edge(f,'Sobel');
>> figure,imshow(g)
%上面是自动阈值的,如果要取特定阈值,可以这样:g=edge(f,'Sobel',0.);剩下的几个算法是把Sobel改为prewitt,roberts,rob,log,Marr,Canny。“Marr”算法太老了,matlab会自动用“laplace”代替,汗...
%加入噪声的语句:
f1 = imnoise(f,'salt & pepper', 0.);
figure,imshow(f1);
%这是加椒盐噪声“salt & pepper”的,浓度为0.
- 上一条:微信扫码助手源码
- 下一条:大智慧胜负筹码源码_大智慧胜负筹码源码怎么看