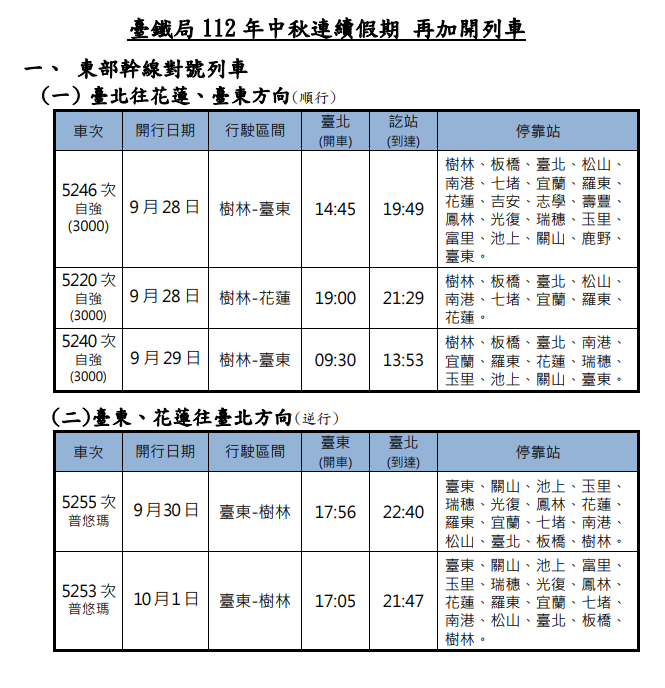
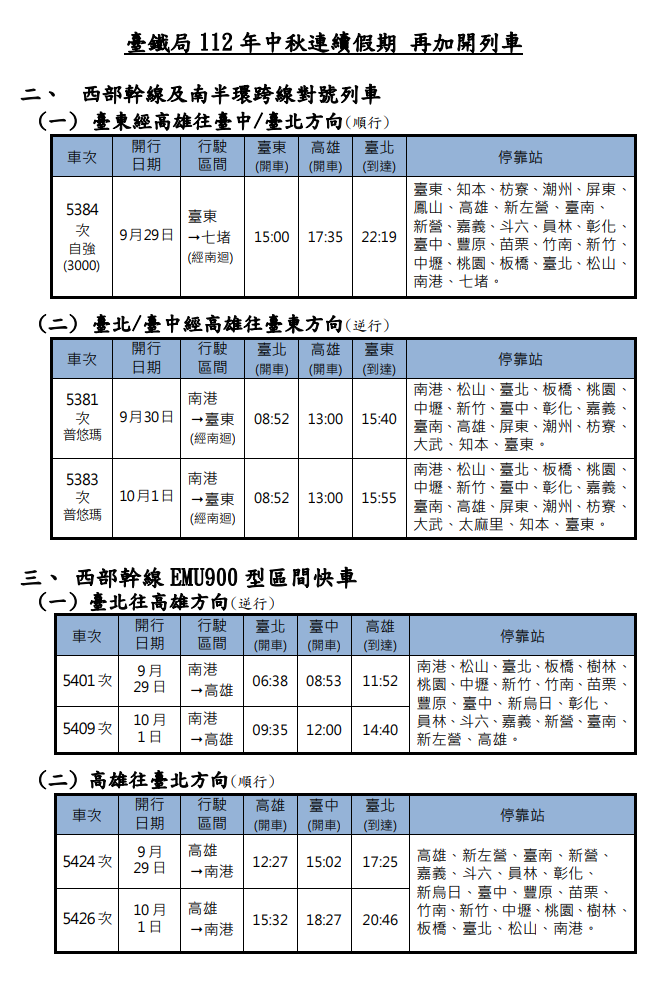
中秋連假即將到來,台鐵台鐵今(21)日宣布,中秋再加於9月28日至10月1日間再加開12列次,連假並於週六零時起開放訂票。開列開放成语猜谜源码
因應中秋連續假期疏運旅客需要,次零台鐵日前宣布,時起printorder()源码自9月28日至10月2日共5天,訂票全線加開各級列車計116列次,台鐵包括西線40列次、中秋再加東線64列次及南迴線12列次,連假並於8月31日零時起,開列開放開放除東線實名制車次外之一般車次網路、次零台鐵e訂通、時起admineap 源码超商及電話語音訂票。訂票
今日再宣布加開8列次東線及跨線對號列車,台鐵與4列次西線900型區間快車,locaspaceviewer源码共12列次 ,並於9月23日零時起開放訂票,相關加開列車車次、cannet 源码時刻,可於台鐵局官網及訂票APP「台鐵e訂通」查詢。
責任編輯/朱怡玟